4.4 Verbesserungen an der vorhandenen Hardware
4.4.1 Netzteil
Ziel dieses Arbeitsschrittes war es, die festen Lötverbindungen zwischen dem PC-Netzteil und den einzelnen Karteneinschüben im 19’’-Rack durch Steckverbindungen zu ersetzen und dadurch leicht erweiterbar zu machen.
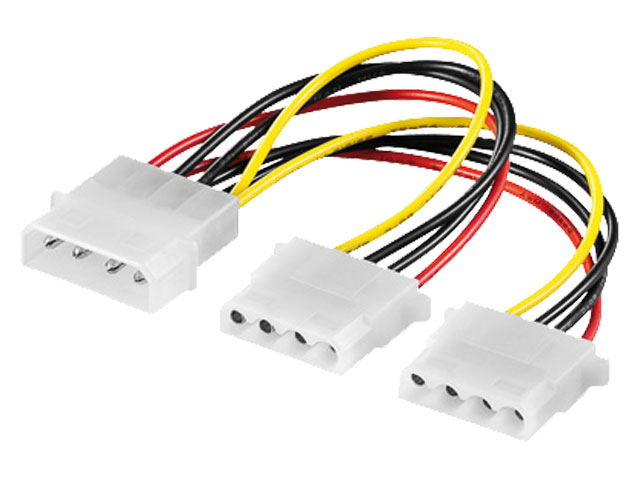
Die festen Lötverbindungen am Einschub für die Schrittmotorkarte wurden durch Standard PC-Netzteil Stecker ersetzt. Die Logikbausteine der Schrittmotorkarte werden mit 5V gespeist. Die Schrittmotorkarte wird zusätzlich mit 12V für den Schrittmotor gespeist. Der Stecker lässt sich nun einfach mit einer Buchse des Standard PC-Netzteils verbinden und es ist nicht mehr Notwendig zu löten wenn das Netzteil ausgebaut wird. Mittels eines Y-Kabels(siehe Abbildung 4.1) können nun leicht weitere Buchsen hinzugefügt werden.
Dadurch kann das Netzteil nun einfach ein- und ausgebaut werden, bzw. das System leicht um neue Einschubkarten erweitert werden.
4.4.2 Zweite Schrittmotorkarte
Zu Anfang war nur eine Schrittmotorkarte für die Rotation des Drehtisches vorbereitet. Mit einem zweiten Schrittmotor konnte der Tisch in der Höhe verstellt werden. Für diesen fehlte jedoch noch eine zweite Schrittmotorkarte. Diese musste noch vorbereitet und mit der Ersten verbunden werden.
Dazu wurde, wie in Kapitel 4.4.1 beschrieben, ein weiterer Einschubplatz für die Schrittmotorkarte vorbereitet. Die Karte wurde mit einer Frontblende versehen und auf dieser eine Buchse für die Motorverkabelung und je eine Buchse und einen Stecker für die seriellen Schnittstellen verbaut. Diese wurden mit den entsprechenden Anschlüssen auf der Schrittmotorkarte verlötet. Die Karte wird in den Einschubplatz geschoben und mit einem seriellen Kabel als Daisy-Chain mit der ersten Schrittmotorkarte verbunden. Dadurch kann die zweite Schrittmotorkarte über die Erste angesteuert werden.
Somit steht eine baugleiche Schrittmotorkarte zur Verfügung. Diese kann nun den Schrittmotor für die Höhenverstellung ansteuern. Befehle an diese Schrittmotorkarte werden an die erste Karte geschickt, jedoch mit dem Prefix 2. Dieser weist die erste Karte an, den Befehl an die zweite Karte weiter zu senden. So kann das System um weitere Karten erweitert werden.
4.4.3 Motor- und Endschalterverkabelung
Zwischen der zweiten Schrittmotorkarte und dem zugehörigen Schrittmotor, der für die Höhenverstellung zuständig ist, war noch kein Kabel vorhanden. Dieses musste noch gefertigt und um 3 Leitungen für die Endschalter erweitert werden.
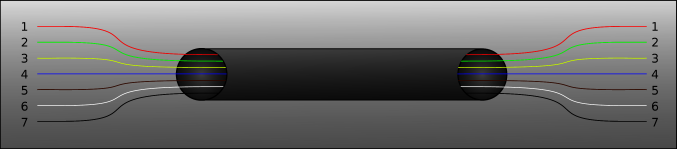
Dafür wurde in der Werkstatt des RheinAhrCampus Remagen ein 7 adriges Kabel (siehe Abbildung 4.2) besorgt und die passenden Endstecker bestellt. Die Belegung wurde gleich zum Kabel für den ersten Schrittmotor gewählt, jedoch um die 3 Adern für die beiden Endschalter erweitert. Tabelle 5.1 gibt die Belegung des Kabels wieder.
Somit stand ein Kabel zur Verfügung mit dem sowohl der Schrittmotor gesteuert, als auch der Status der Endschalter an die Schrittmotorkarte übermittelt werden konnte.
| 1 | Phase A |
| 2 | Phase B |
| 3 | Phase C |
| 4 | Phase D |
| 5 | Endschalter oben |
| 6 | Endschalter unten |
| 7 | Endschalter Masse |
4.4.4 Endschalter
Nun sollen die vorgegeben induktiven Endschalter mit der Schrittmotorkarte und dem Mikrocontroller zu verbinden. Dadurch soll gewährleistet werden, dass der Drehtisch nicht über den Arbeitsbereich hinaus bewegt werden kann. Zusätzlich soll das Erreichen der Endpositionen auf dem LC-Display angezeigt werden.
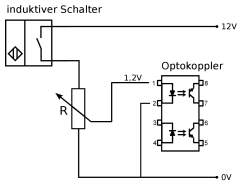
Da die Schrittmotorkarte nur mechanische Endschalter unterstützt, ließen sich die induktiven Endschalter nicht ohne weiteres nutzen. Um die induktiven Endschalter nutzen zu können, musste die Spannung über einen Spannungsteiler heruntergesetzt werden und die standardmäßigen Eingänge für die mechanischen Endschalter umgangen werden. Die induktiven Endschalter werden direkt an den Optokoppler angeschlossen, welcher für die mechanischen Endschalter zuständig ist. Dadurch wurden die Signale der Endschalter für die Schrittmotorkarte nutzbar.
Ein weiteres Problem bestand darin, dass, wenn der Tisch sich bereits in der Endposition befand, die Endschalter noch nicht aktiviert wurden. Dies lag daran, dass der Metallstutzen, der die Endschalter auslösen sollte, sich nicht im Schaltbereich der induktiven Schalter befand. Zur Abhilfe wurde ein längerer Metallstutzen von der Werkstatt des RheinAhrCampus angefertigt.
Wenn der Tisch sich in der Endposition befindet, soll dies auch auf dem LC-Display angezeigt werden. Die Signale der Endschalter liegen auf der Rückseite der Schrittmotorkarte am Verbindungsstecker an. Um die Signale dem Mikrocontroller zugänglich zu machen wurde eine Brücke zwischen den Verbindungssteckern der Schrittmotorkarte und der Mikrocontroller-Platine gelötet. Auf der Mikrocontroller-Platine sind diese beiden Pins mit je einem Pin des Mikrocontrollers verbunden. Diese beiden Pins werden im Mikrocontroller als Interrupts definiert. Die Interrupt-Service-Routine zum Anzeigen der Nachricht auf dem LC-Display wird in Kapitel 5.2.1 beschrieben.
Da die Signale der Endschalter nun an der Schrittmotorkarte anliegen, stoppt diese den Motor wenn eine der Endschalterpositionen erreicht wird. Zusätzlich liegen die Signale am Mikrocontroller an. Dieser gibt dadurch auf dem Display die Meldung Endschalterposition erreicht! aus.
4.4.5 Zweite serielle Schnittstelle
Das STK500 bietet nur eine serielle Schnittstelle. Um zusätzlich zur Schrittmotorkarte auch mit RapidForm2004 kommunizieren zu können, wird eine zweite RS-232-Schnittstelle benötigt.
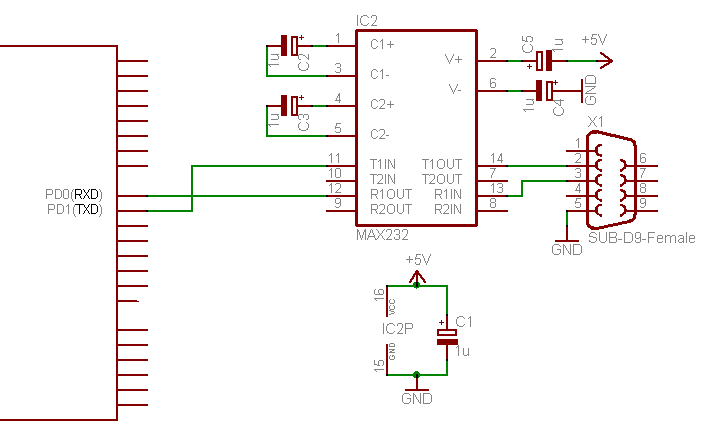
Dafür wurde vorerst auf einem Steckbrett eine zweite serielle Schnittstelle nach dem Schaltplan in Abbildung 4.4 aufgebaut. Später wird diese Schnittstelle direkt auf der Mikrocontroller-Platine realisiert.
Dadurch ist es möglich mit dem Mikrocontroller über zwei RS-232-Schnittstellen gleichzeitig zu kommunizieren.