Kapitel 2 Vorstellung der vorhandenen Hardware
Die Hardware besteht im Wesentlichen aus den Komponenten in Abbildung 2.1.
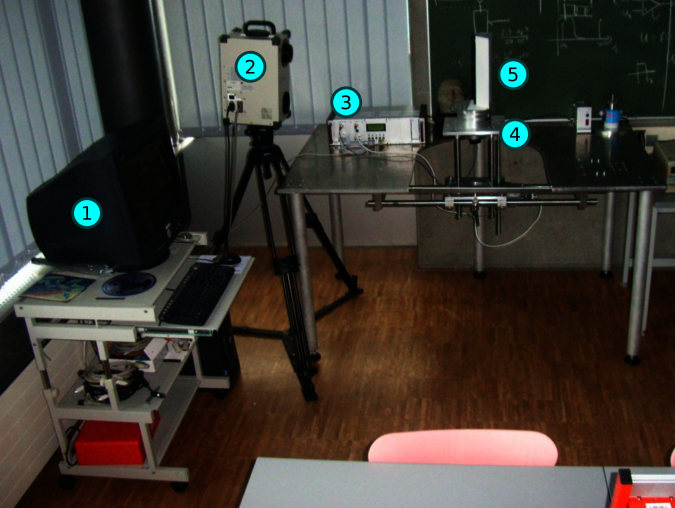
| 1 | Computer |
|---|---|
| 2 | 3D-Laserscanner VI-900 |
| 3 | Ansteuerung für den Drehtisch |
| 4 | Drehtisch |
| 5 | Zu scannendes Objekt (Kalibrierblech) |
Die Hardware besteht im Wesentlichen aus den Komponenten in Abbildung 2.1.
| 1 | Computer |
|---|---|
| 2 | 3D-Laserscanner VI-900 |
| 3 | Ansteuerung für den Drehtisch |
| 4 | Drehtisch |
| 5 | Zu scannendes Objekt (Kalibrierblech) |